MIT CSAIL researchers combined GenAI and a physics simulation engine to refine robotic designs. The end result: the machine that out-jumped a robot designed by human beings.
Diffusion models like OpenAI’s DALL-E have becoming increasingly useful in supporting brainstorm new designs. Humans can prompt these systems to generate an image, create a video, or refine a blueprint, and returned with ideas they hadn’t taken into consideration before.
But did you know that generative artificial intelligence (GenAI) models also are making headway in generating working robots? Recent diffusion-based approaches have created structure and the systems that control them from scratch. With or without a user’s input, these models can make new designs and then compare them in simulation earlier than they’re fabricated.
A new approach from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) applies this generative know-how toward enhancing human beings’ robot designs. Users can draft a 3d model of a robot and specify which parts they’d like to see a diffusion model modify, presenting its dimensions advance. GenAI then brainstorms the optimal shape for those regions and tests its ideas in simulation. When the system finds the proper design, you can save and after which fabricate a working, real-world robot with a 3-D printer, without needing extra tweaks.
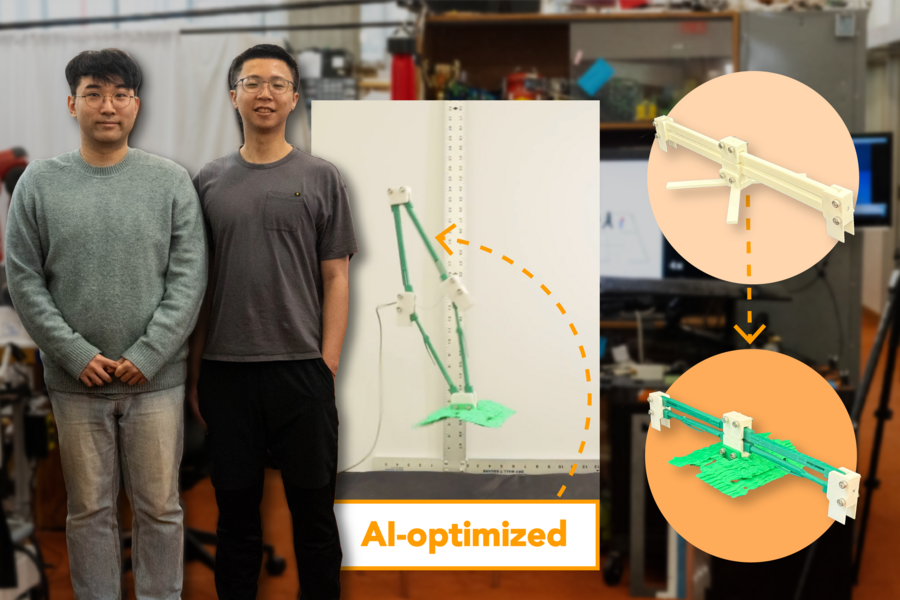
The researchers used this technique to create a robot that leaps up an average of approximately 2 ft, or 41% higher than a comparable machine they created on their very own. The machines are almost identical in appearance: They’re both made of a sort of plastic referred to as polylactic acid, and while they to begin with seem flat, they spring up into a diamond shape whilst a motor pulls at the cord connected to them. So what precisely did AI do in a differently?
A closer appearance exhibits that the AI-generated linkages are curved, and resemble thick drumsticks (the musical instrument drummers use), while the standard robot’s connecting elements are straight and rectangular.
Better and better blobs
The researchers started to refine their jumping robot by way of sampling 500 potential designs using of an initial embedding vector — a numerical representation that captures high-level functions to guide the designs created via the AI model. From those, they decided on the pinnacle 12 options based on overall performance in simulation and used them to optimize the embedding vector.
This process was repeated 5 times, step by step guiding the AI model to generate better designs. The resulting layout resembled a blob, so the researchers precipitated their system to scale the draft to suit their 3d model. They then fabricated the shape, locating that it certainly improved the robot jumping competencies.
The benefit of using diffusion models for this task, according to co-lead author and CSAIL postdoc Byungchul Kim, is that they can discover unconventional solutions to refine robots.
“We wanted to make our machine jump higher, so we figured we ought to just make the links connecting its components as possible as to lead them to light,” says Kim. “However, the sort of thin structure can easily spoil if we just use 3D printed material. Our diffusion model came up with a better concept with the idea of suggesting a unique form that allowed the robot to save extra power before it jumped, with out making the links too thin. This creativity supported us learn about the machine’s underlying physics.”
The team then tasked their system with drafting an optimized foot to ensure it landed correctly. They repeated the optimization procedure, sooner or later deciding on the best-appearing design to connect to the bottom in their machine. Kim and his colleagues located that their AI-designed machine fell a long way much less often than its baseline, to the tune of an 84% improvement.
The diffusion model’s ability to upgrade a robot jumping and landing skills shows it may be useful in improving how other machines are designed. For instance, a company running on manufacturing or household robots ought to use a similar approach to improve their prototypes, saving engineers time typically reserved for iterating on those modifications.
The balance behind the bounce
To create a robot that would jump high and land stably, the researchers identified that they needed to strike a balance among both aims. They represented each leaping height and landing achievement rate as numerical data, and then trained their system to discover a sweet spot among each embedding vectors that might assist construct an most appropriate 3d structure.
The researchers note that while this AI-assisted robot outperformed its human-designed counterpart, it may soon reach even greater new heights. This generation involved using materials that were compatible with a 3D printer, but future versions would bounce even higher with lighter materials.
Co-lead author and MIT CSAIL PhD scholar Tsun-Hsuan “Johnson” Wang says the venture is a jumping-off factor for brand new robotics designs that generative AI ought to assist with.
“We need to branch out to more flexible goals,” says Wang. “Imagine the use of natural language to guide a diffusion model to draft a robot which can pick out up a mug, or operate an electric drill.”
Kim says that a diffusion model can also help to generate articulation and ideate on how components connect, potentially enhancing how high the robot would jump. The team is also exploring the possibility of adding more motors to control which direction the machine jumps and possibly improve its landing stability.
The researchers’ work was supported, in part, with the aid of the National Science Foundation’s Emerging Frontiers in Research and Innovation program, the Singapore-MIT Alliance for Research and Technology’s Mens, Manus and Machina program, and the Gwangju Institute of Science and Technology (GIST)-CSAIL Collaboration. They presented their work at the 2025 International Conference on Robotics and Automation.